VerktygX
Upptäck. Streama. Hantera. Konfigurationsfri videodistribution för GVA-plattformar. DEF STAN 00-082-kompatibel videoströmning
Utmaningen
Moderna bepansrade fordon har över 20 kameror – dagsljuskameror, termiska kameror och passagerarkameror – som alla streamas samtidigt över en delad Ethernet-stamnätsmodell. DEF STAN 00-082 kräver att varje skärm på fordonet kan upptäcka och rendera vilken ström som helst, automatiskt, utan manuell konfiguration.
ToolX gör det möjligt.
Hur det fungerar
Anslut en kamera till fordonets nätverk. ToolX meddelar den. Varje skärm hittar den. Videon flödar. Det är allt.
Tre protokoll fungerar sömlöst tillsammans:
| Protokoll | Vad den gör | |
|---|---|---|
| Upptäcka | SAV | Kameror meddelar sig själva på nätverket med några sekunders mellanrum |
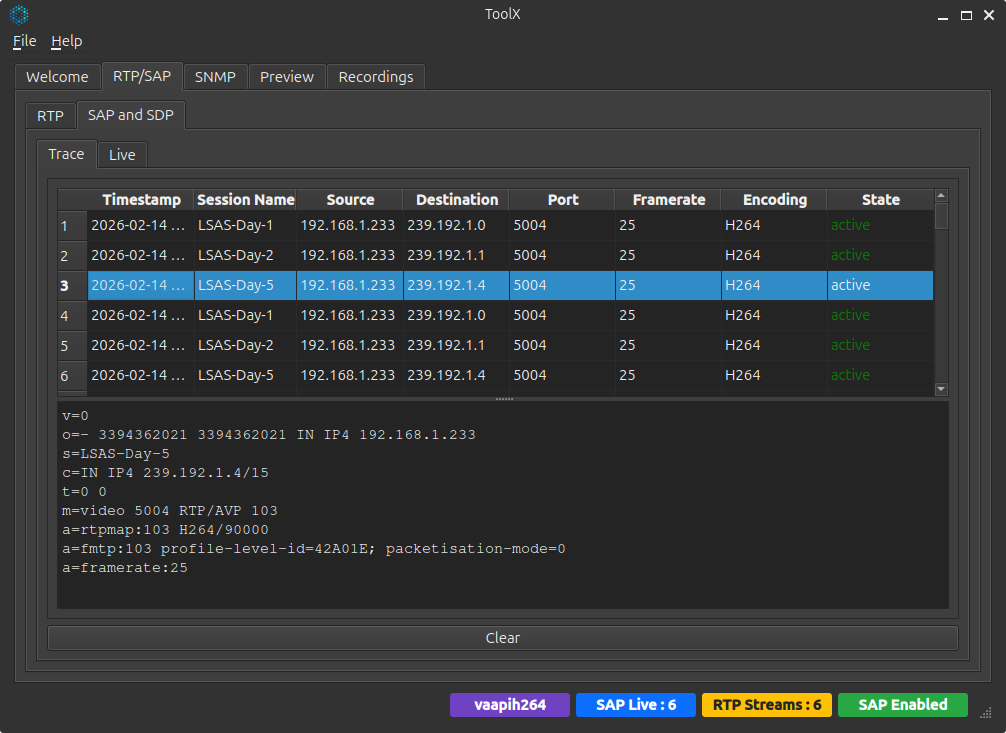
| Beskriva | SDP | Varje meddelande innehåller information om upplösning, kodek och adress. |
| Leverera | RTP | Videonyttolastströmmar över effektiv UDP-multicast |
Viktiga funktioner
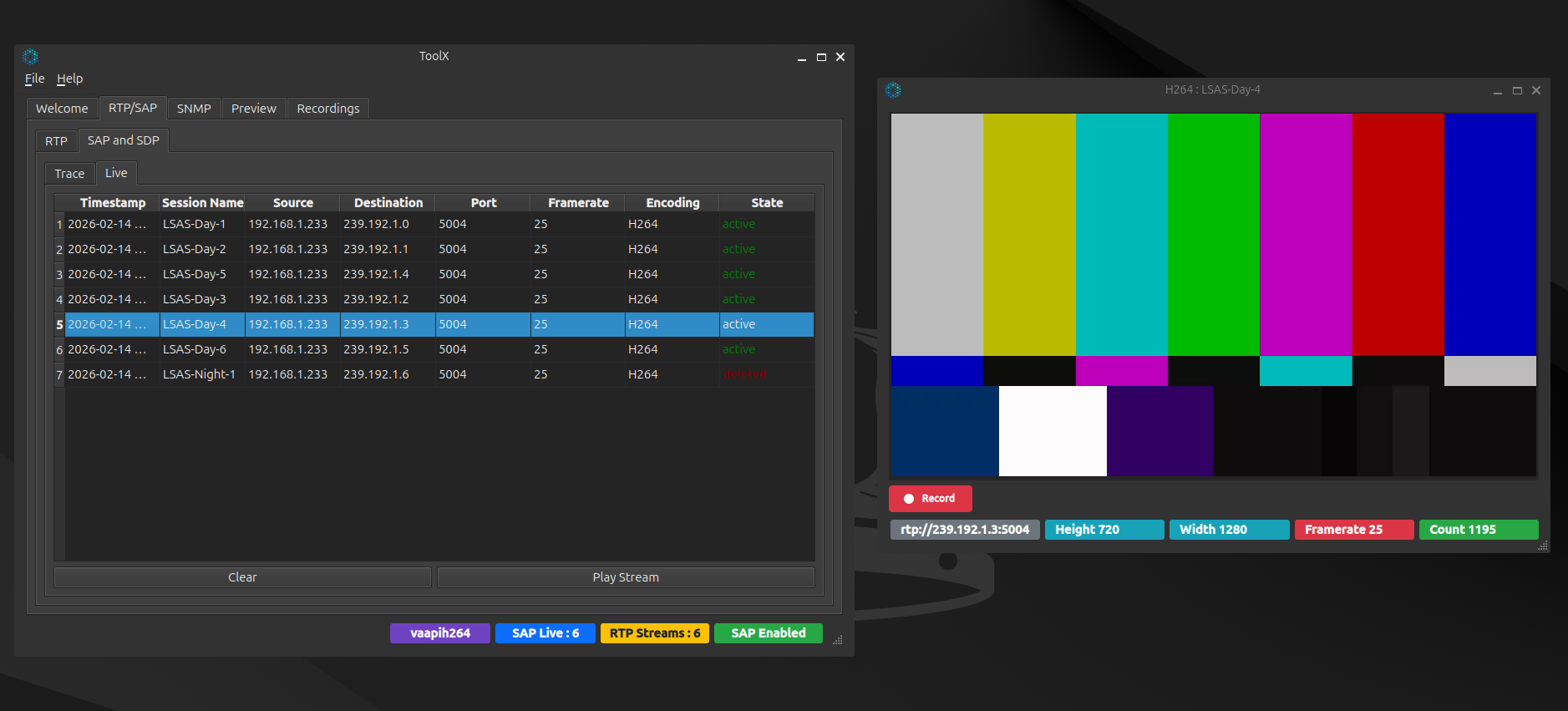
Automatisk strömupptäckt
Inga IP-adresser att konfigurera. Inga kalkylblad att underhålla. Kameror sänder SAP-meddelanden i nätverket, och ToolX skapar en live-inventering av alla tillgängliga flöden – uppdaterade i realtid.
- Strömmar visas inom några sekunder efter att en kamera kopplas online
- Inaktuella flöden flaggas automatiskt när meddelanden upphör
- Ren borttagning via SAP-radering när en kamera stängs av
Brett codec-stöd
Från förlustfri okomprimerad till bandbreddseffektiv komprimerad – välj rätt format för uppdraget.
| Formatera | Kvalitet | Bandbredd | Bäst för |
|---|---|---|---|
| YCbCr 4 2 | Förlustfri | ~368 Mbit/s | Maximal återgivningskvalitet, 10 GbE-nätverk |
| RGB 24-bitars | Förlustfri | ~553 Mbit/s | Allmänt bruk, fullt färgdjup |
| Mono 8/16-bitars | Förlustfri | ~18 / 37 Mbit/s | Värmeavbildningssensorer (TI) |
| H.264 | Nästan förlustfri | ~2–8 Mbit/s | Standard 1 GbE-nätverk, flera kameror |
| H.265 | Nästan förlustfri | ~1–4 Mbit/s | Bandbreddsbegränsade länkar |
Hårdvaruaccelererad kodning
Flera kodare-backends håller latensen låg och CPU-användningen minimal:
- VA-API — GPU-hårdvaruacceleration (standard)
- OpenH264 — Bärbar programkod
- OpenMAX — Inbyggda plattformar (Raspberry Pi, SBC:er)
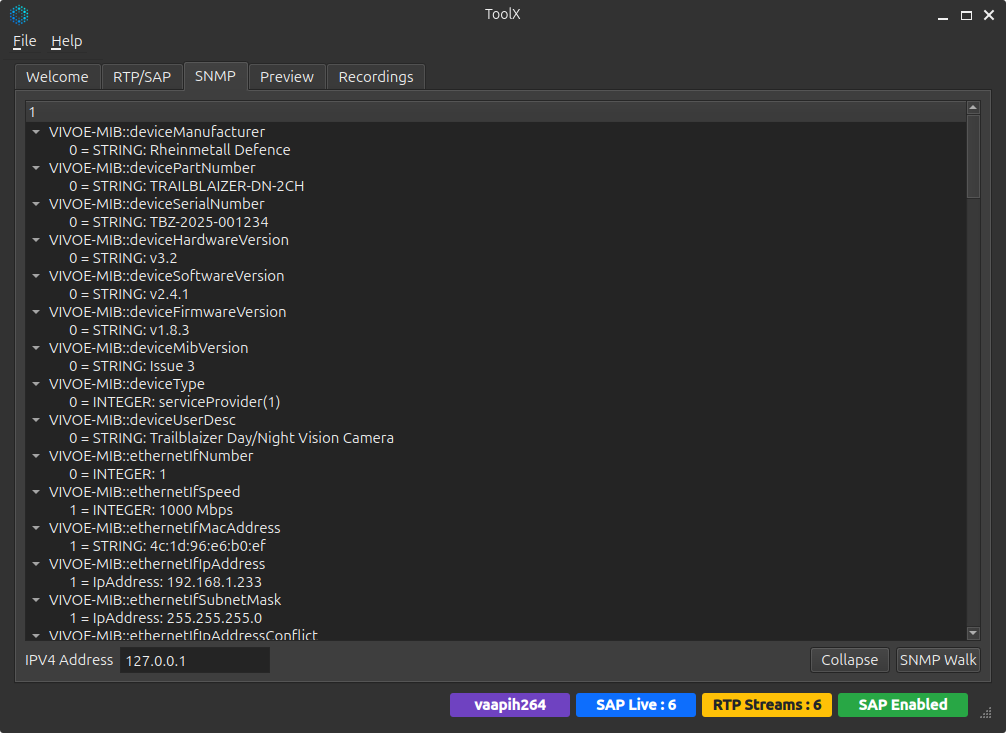
Inbyggd enhetshantering (VIVOE MIB)
Varje kamera i ett GVA-nätverk har ett standardiserat SNMP-hanteringsgränssnitt som definieras av DEF STAN 00-082 bilaga A. ToolX har en inbyggd SNMP-webbläsare för att fråga alla kompatibla enheter.
Manufacturer, serial, versions "] B["videoFormatTable
Resolution, codec, colourspace "] C["channelControl
Multicast IP, RTP config, SAP "] D["vivoeNotifications
Error & conflict traps "] end ROOT --> A ROOT --> B ROOT --> C ROOT --> D
DEF STAN 00-082 i korthet
Allt ToolX gör är direkt kopplat till standarden. Så här ser efterlevnaden ut:
| Krav | Standard säger | ToolX levererar |
|---|---|---|
| Strömtransport | RTP över UDP-multicast | Alla strömmar på 239.192.xx:5004 |
| Okomprimerad video | RFC 4175 obligatorisk | RGB24, YCbCr 42, Mono8, Mono16 |
| Strömupptäckt | SAP/SDP krävs | Automatisk meddelande + live upptäcktstabell |
| Borttagning av ström | SAP-borttagning krävs | Rengör avstängningsmeddelanden |
| Enhetshantering | VIVOE MIB över SNMPv2c | Inbyggd SNMP-promenad och fråga |
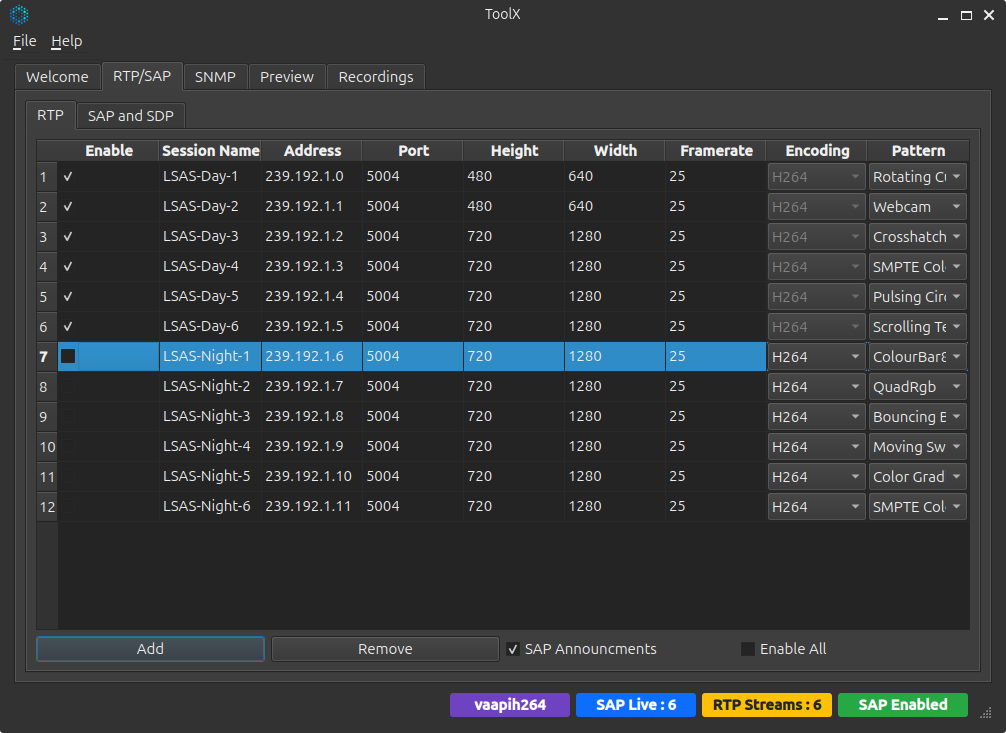
| Kameranamn | GVA-beteckningar | Standardnamngivning för DL / TI / PAX |
| Multiström | 20+ samtidiga matningar | Testad med kompletta fordonskameror |
GVA-kamerabeteckningar
Kameror följer ett standardiserat namngivningsschema så att operatörerna alltid vet vilken vy de tittar på:
| Koda | Menande | Exempel |
|---|---|---|
| DL | Dagsljus (synligt spektrum) | Främre mitten DL |
| TI | Termisk avbildning (infraröd) | Främre mitten TI |
| PAX | Passagerare / interiör | PAX-kamera 1 |
Kombinerat med position – fram , bak , vänster , höger , mitten – har varje kamera i fordonet en unik, läsbar identitet.
Nätverksarkitektur
Stream Discovery"] RTP["RTP
Video Delivery"] SNMP["SNMPv2c
VIVOE MIB"] end subgraph "Transport" SAP --> UDP1["UDP 224.2.127.254:9875"] RTP --> UDP2["UDP 239.192.x.x:5004"] SNMP --> UDP3["UDP unicast :161"] end subgraph "Network" UDP1 --> MC["IPv4 Multicast"] UDP2 --> MC UDP3 --> UC["IPv4 Unicast"] end MC --> ETH["1 GbE / 10 GbE Ethernet"] UC --> ETH
Bandbreddsplanering
Använder du flera kameror? Här är vad du kan förvänta dig vid 1280×720 vid 25 fps:
| Codec | Per ström | 11 kameror | 20 kameror |
|---|---|---|---|
| YCbCr 4 2 | 369 Mbit/s | 4,1 Gbps | 7,4 Gbps |
| H.264 | 2–8 Mbit/s | 22–88 Mbit/s | 40–160 Mbit/s |
| H.265 | 1–4 Mbit/s | 11–44 Mbit/s | 20–80 Mbit/s |
Slutsats: H.264 passar bekvämt en komplett fordonskamerauppsättning på ett vanligt 1 GbE-stamnät. Okomprimerat kräver 10 GbE men levererar pixelperfekta bilder utan latens.
Implementeringsscenarier
H.264 720p 25fps"] end subgraph "Trailblaizer Pod" C2["2 Cameras
Day + Night
1080p H.264"] end subgraph "Pi Camera Array" C3["6 × Raspberry Pi
720p H.264"] end C1 --> N["GVA Ethernet Backbone"] C2 --> N C3 --> N N --> D1["Crew Station 1"] N --> D2["Crew Station 2"] N --> D3["Commander Display"] N --> TX["ToolX
Diagnostics &
Monitoring"]
Varför ToolX
- Standarder först — Byggd från grunden för DEF STAN 00-082 Utgåva 3
- Nollkonfiguration — SAP/SDP automatisk identifiering innebär ingen manuell strömkonfiguration
- Codec-flexibilitet — Okomprimerad för kvalitet, H.264/H.265 för bandbredd, ditt val
- Fullständig diagnostik — Live SAP-övervakning, uppspelning av strömmar, inspektion av SNMP-enheter, inspelning
- Öppen arkitektur — Byggd på MediaX -biblioteket med öppen källkod
- Plattformsoberoende — Linux-nativt med Qt6 GUI, headless CLI-verktyg för inbäddad distribution