Csatatér-irányító rendszer (BMS)
 Satellite
Satellite
 Map
Map
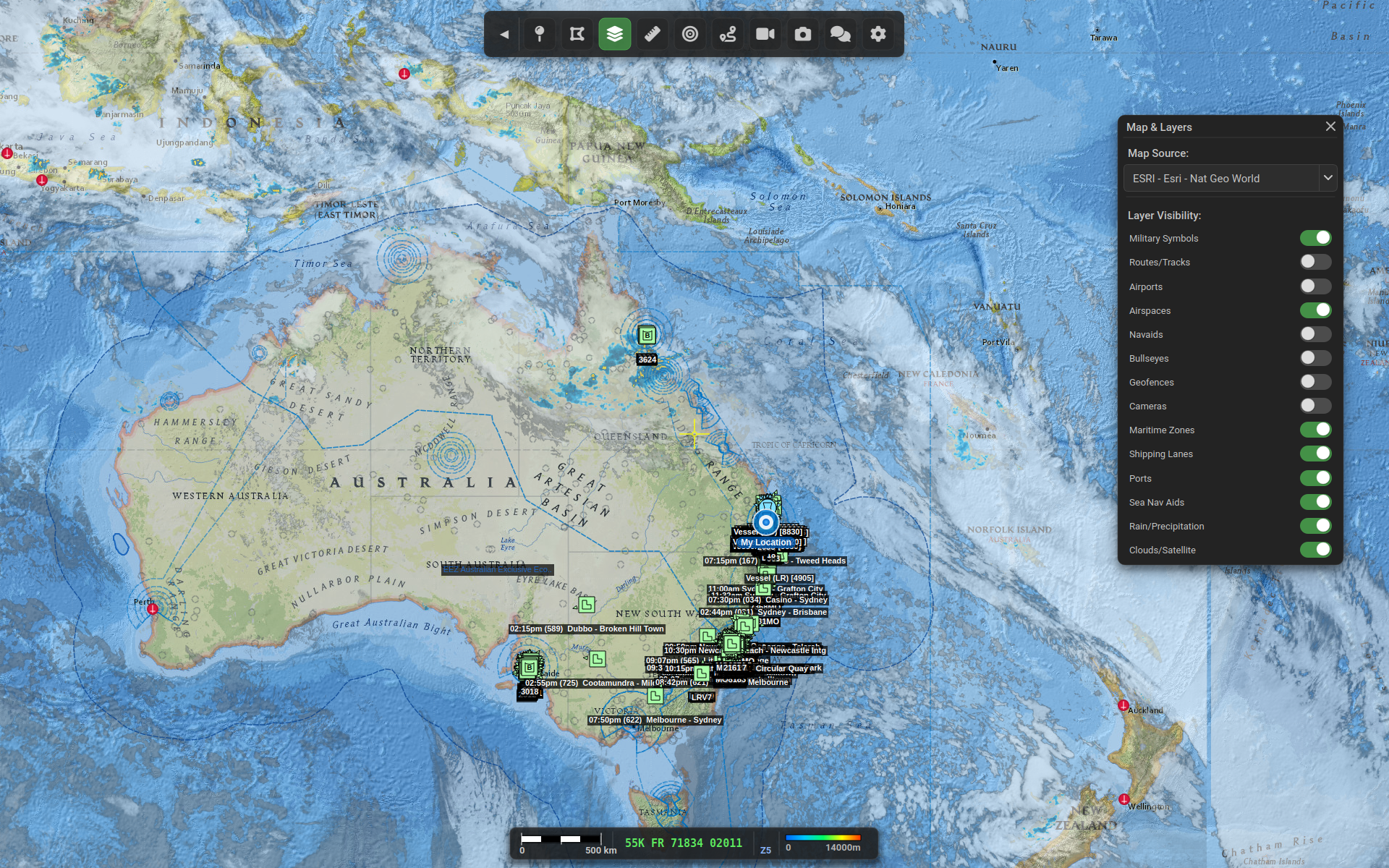
Küldetésre kész helyzetfelismerés
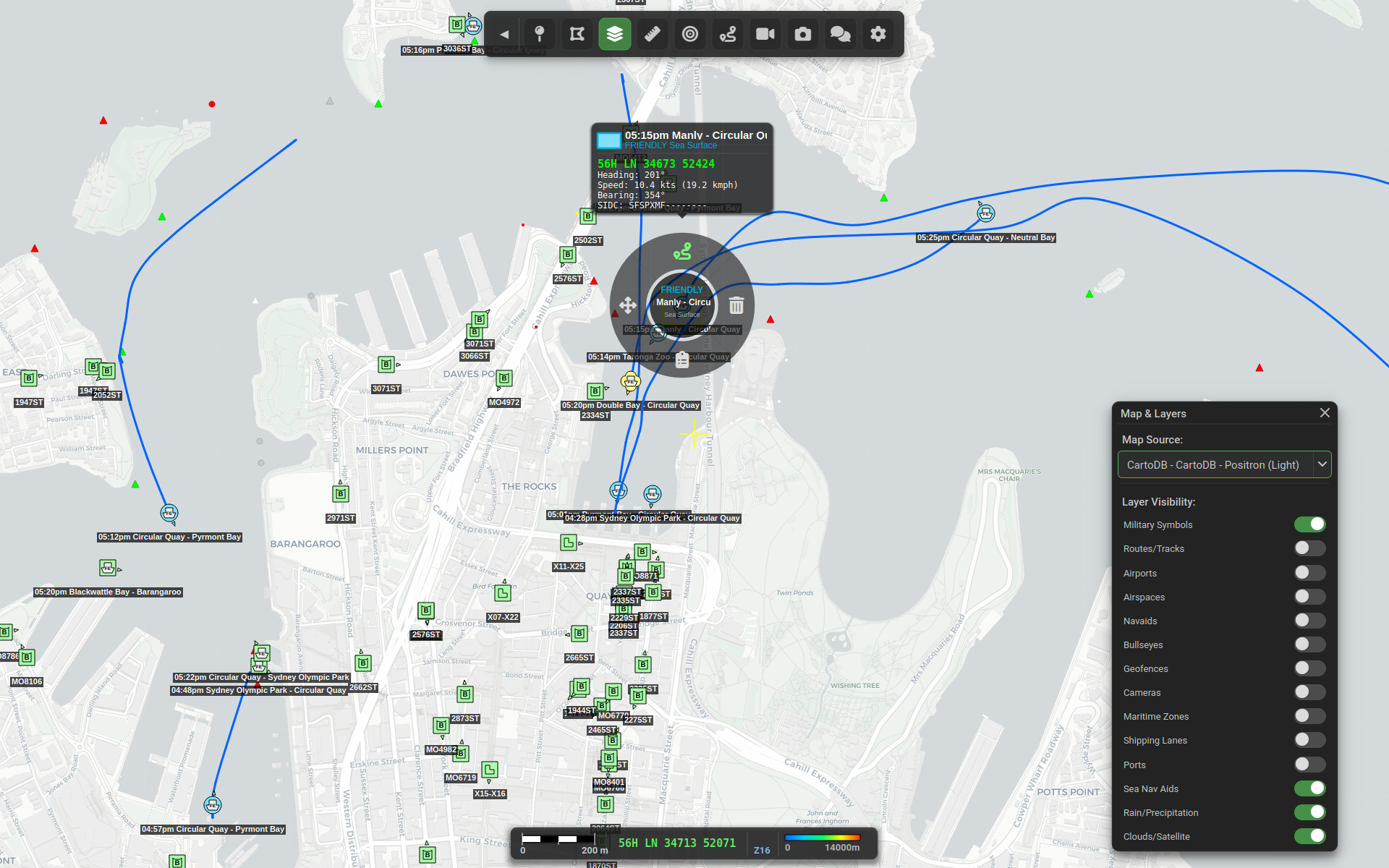
Az Astute Systems csatakezelő rendszere valós idejű taktikai helyzetfelismerést biztosít, amelyet a modern csatatérre terveztek. Az interoperabilitásra és a teljesítményre alapozva, a nulláról felépített csatakezelő rendszerünk a parancsnokokat és a katonákat a szükséges információkkal látja el, amikor szükségük van rá.
Bring your own transponder reciever or connect to online data sources.
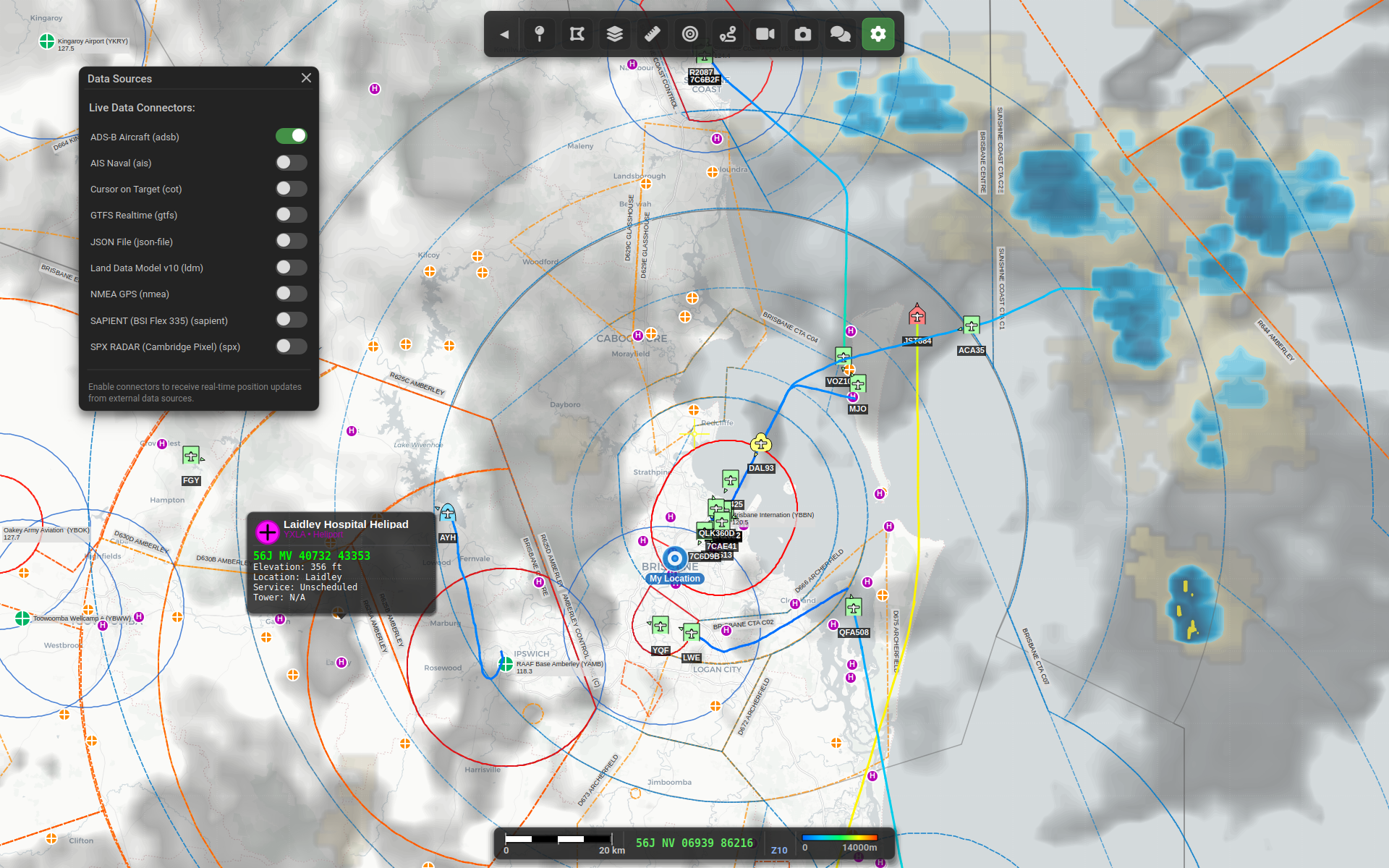
Bring your own transponder reciever or connect to online data sources.
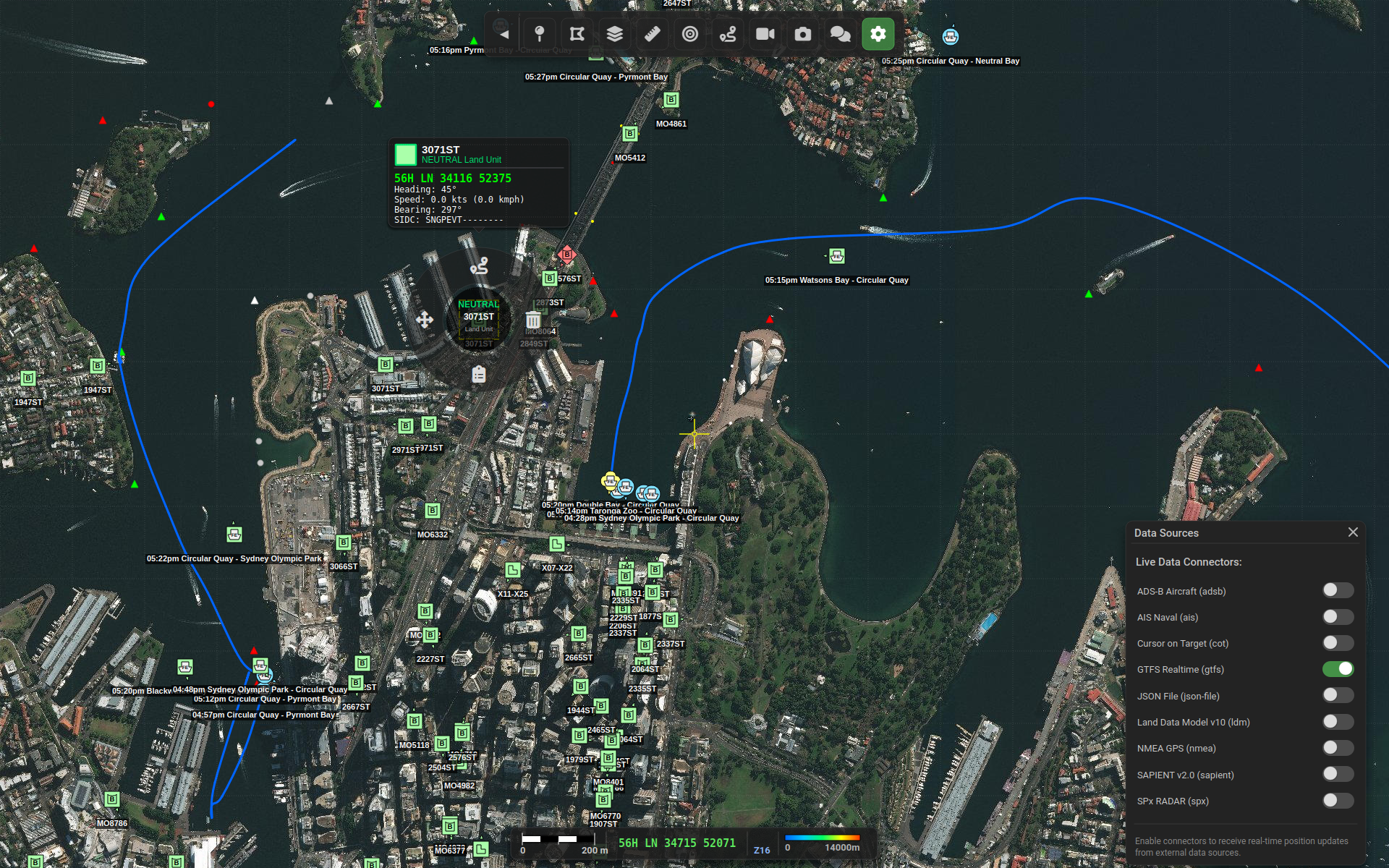
Use Google GTFS protocol to view open source data for bus, trians, light rail, trams and ferries.
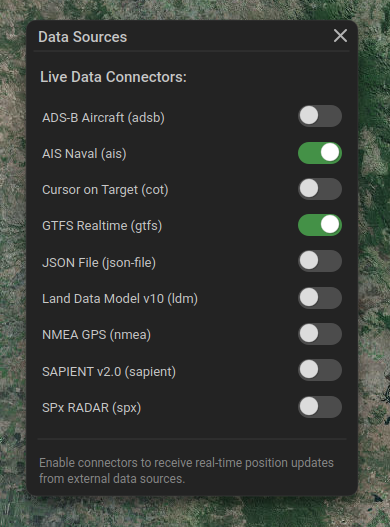
Connectors allow you to add new data sources.
View realtime cloud (satalite images) and rain (RADAR) updates.
Adatfüggetlen architektúra
BMS rendszerünket adatagnosztikus filozófiával terveztük, így biztosítva a maximális rugalmasságot és a jövőbiztos működési követelményeknek való megfelelést.
Csatlakoztasson bármilyen forrást, bármilyen formátumot
- Többszörös adatfolyamok : Zökkenőmentesen betöltheti a taktikai adatokat rádiókból, érzékelőkből, pilóta nélküli repülőgépekből és szövetséges rendszerekből, függetlenül a saját formátumoktól.
- Protokollrugalmasság : Natív támogatás a katonai szabványú protokollokhoz, bővíthető adapterekkel az újonnan megjelenő adatforrásokhoz
- Valós idejű fordítás : Különböző adatformátumok automatikus normalizálása egységes működési képpé
- Nincs szállítói függőség : Az adatai továbbra is elérhetőek és hordozhatóak maradnak, soha nem ragadnak zárt, védett silókban
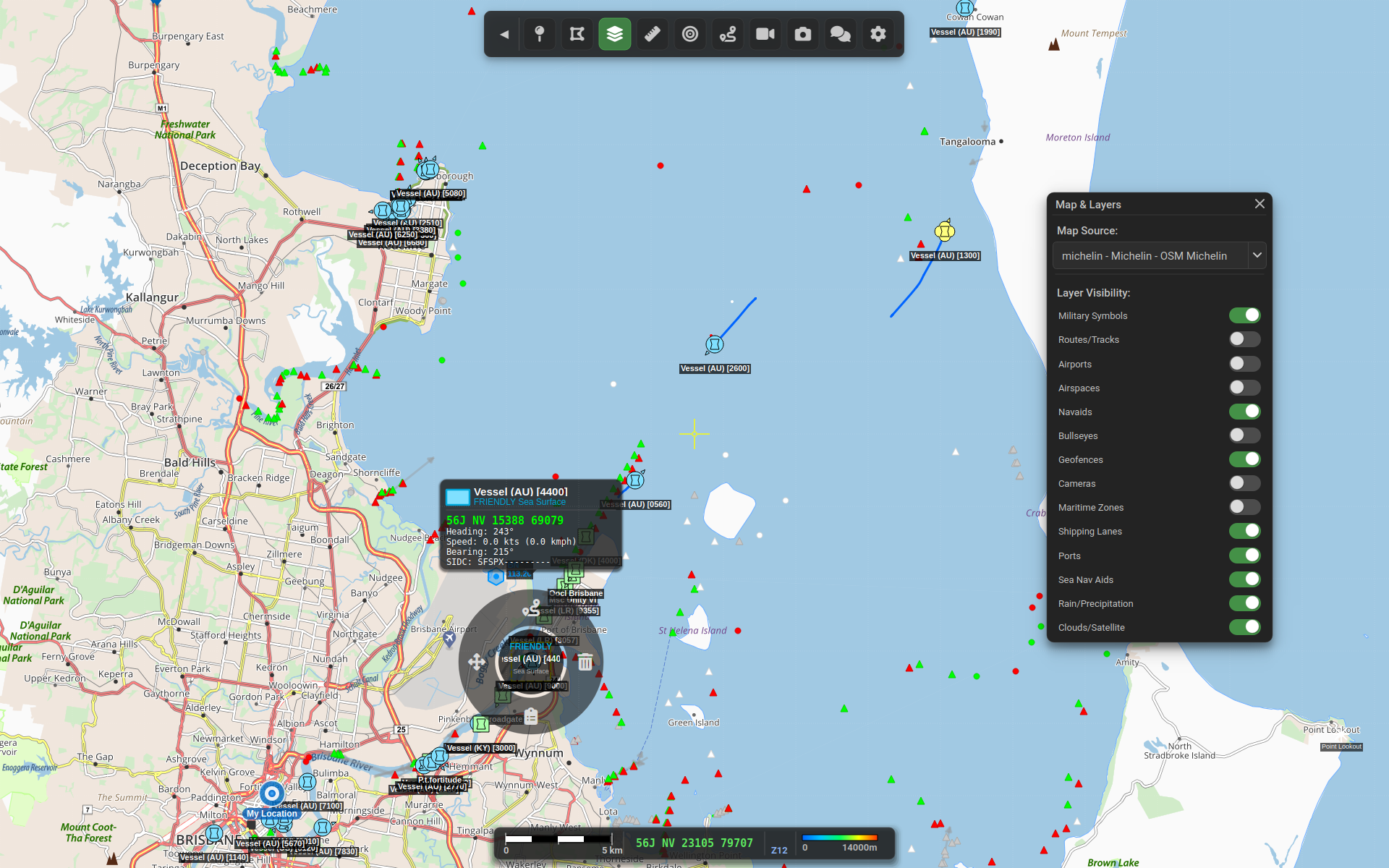
Egységes közös működési kép
Alakítsa át a fragmentált információkat cselekvésre ösztönző intelligenciává. Adatfüggetlen megközelítésünknek köszönhetően a teljes csatateret láthatja – nem csak azt, amit egyetlen rendszer mutatni akar Önnek.
Támogatott csatlakozók és adatforrások
| Csatlakozó | Jegyzőkönyv | Szállítás | Leírás |
|---|---|---|---|
| SPX RADAR | Cambridge Pixel Binary | UDP multicast | RADAR pályajelentések a Cambridge Pixel rendszerektől |
| BÖLCS | BSI Flex 335 v2.0 | TCP Protobuf | Autonóm szenzorintegráció (MI, RADAR) |
| Gyermekágy | Kurzor a Target XML-en | TCP/Multicast | TAK ökoszisztéma integráció (ATAK, WinTAK) |
| NMEA | NMEA 0183 | Soros/TCP | GPS-pozícióadatok |
| ADS-B | OpenSky REST | HTTP/JSON | Valós idejű repülőgép-pozíciók |
| AIS | AIS-üzenetek | WebSocket | Tengeri hajók nyomon követése |
| GTFS | GTFS valós idejű | HTTP/Protobuf | Tömegközlekedési járművek helyzete |
| JSON-fájl | Egyéni JSON | Fájlrendszer | Statikus pozícióadatok élő monitorozással |
| LDM | Földadat-modell v10 | DDS | GVA jármű/egység pozíciók |
![]()
![]()
A BMS rendszerünk a Genaric Vehicle Architecture (GVA) által lehetővé tett termékek szélesebb körének része. A GVA egy nyílt szabvány, amelyet a Land Open Systems Architecture (LOSA) keretében fejlesztettek ki, az Egyesült Királyság Védelmi Minisztériumának kezdeményezéseként, amelynek célja a gyártók közötti interoperabilitás növelése. Tekintse meg az alábbi dokumentációt.