Kaujas lauka pārvaldības sistēma (BMS)
 Satellite
Satellite
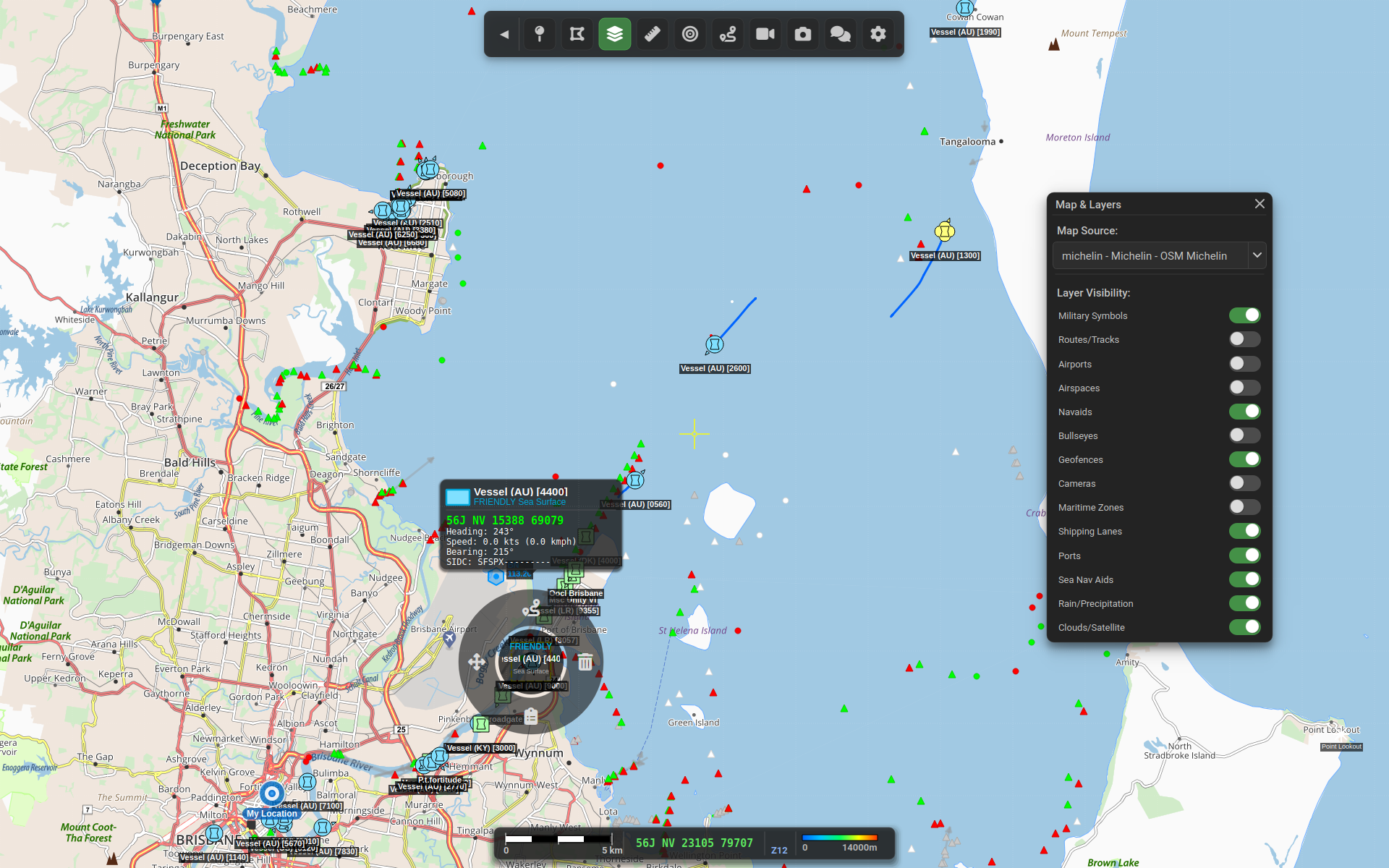
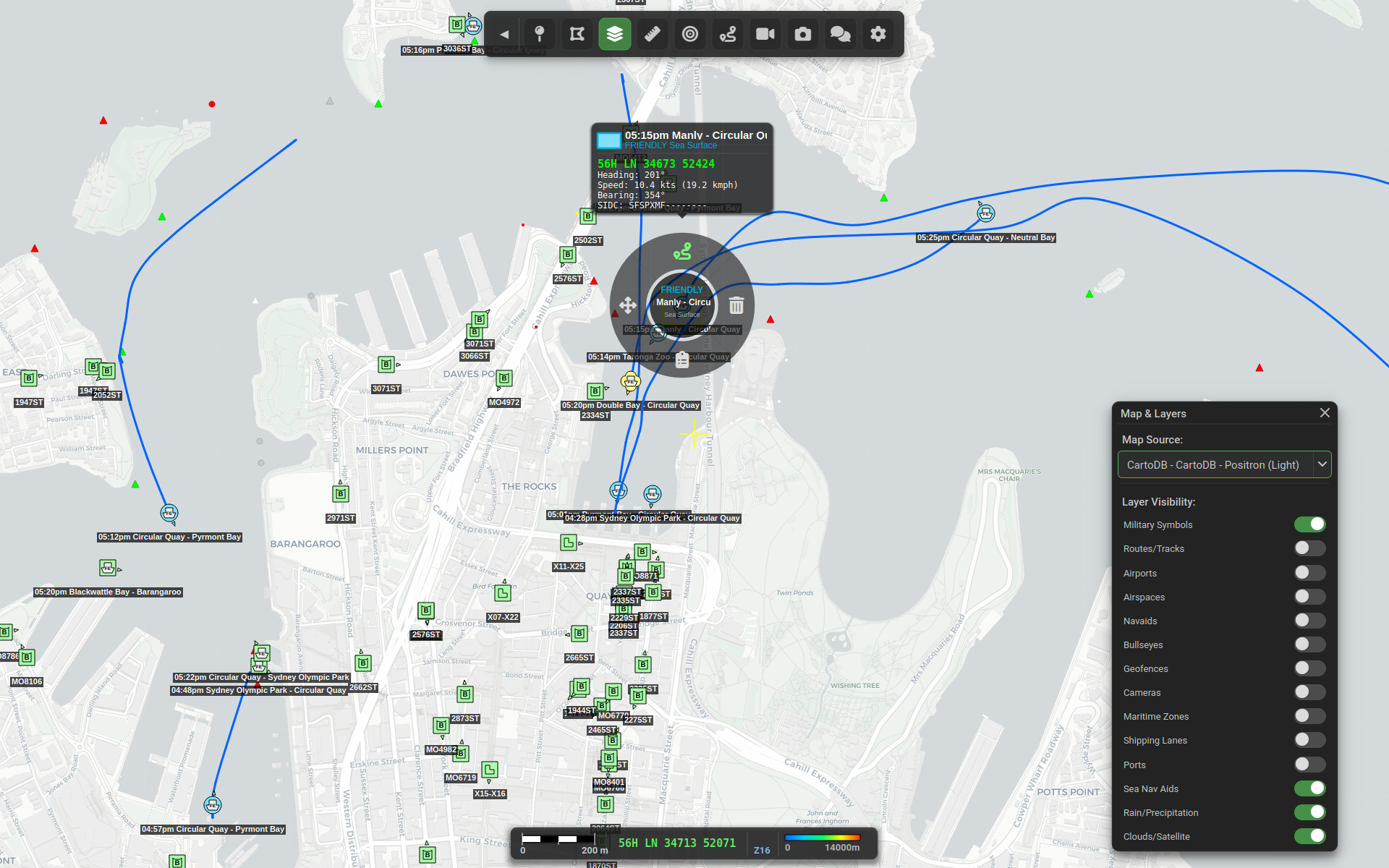 Map
Map
Misijai gatava situācijas izpratne
Astute Systems kaujas vadības sistēma nodrošina reāllaika taktisko situācijas izpratni, kas izstrādāta mūsdienu kaujas laukam. Mūsu kaujas vadības sistēma (BMS), kas izstrādāta no pašiem pamatiem, koncentrējoties uz sadarbspēju un veiktspēju, nodrošina komandieriem un karavīriem nepieciešamo informāciju tieši tad, kad tā ir nepieciešama.
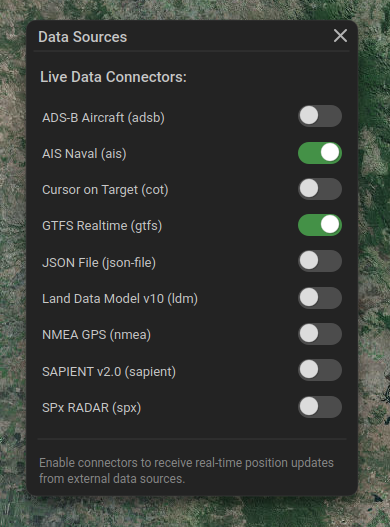
Bring your own transponder reciever or connect to online data sources.
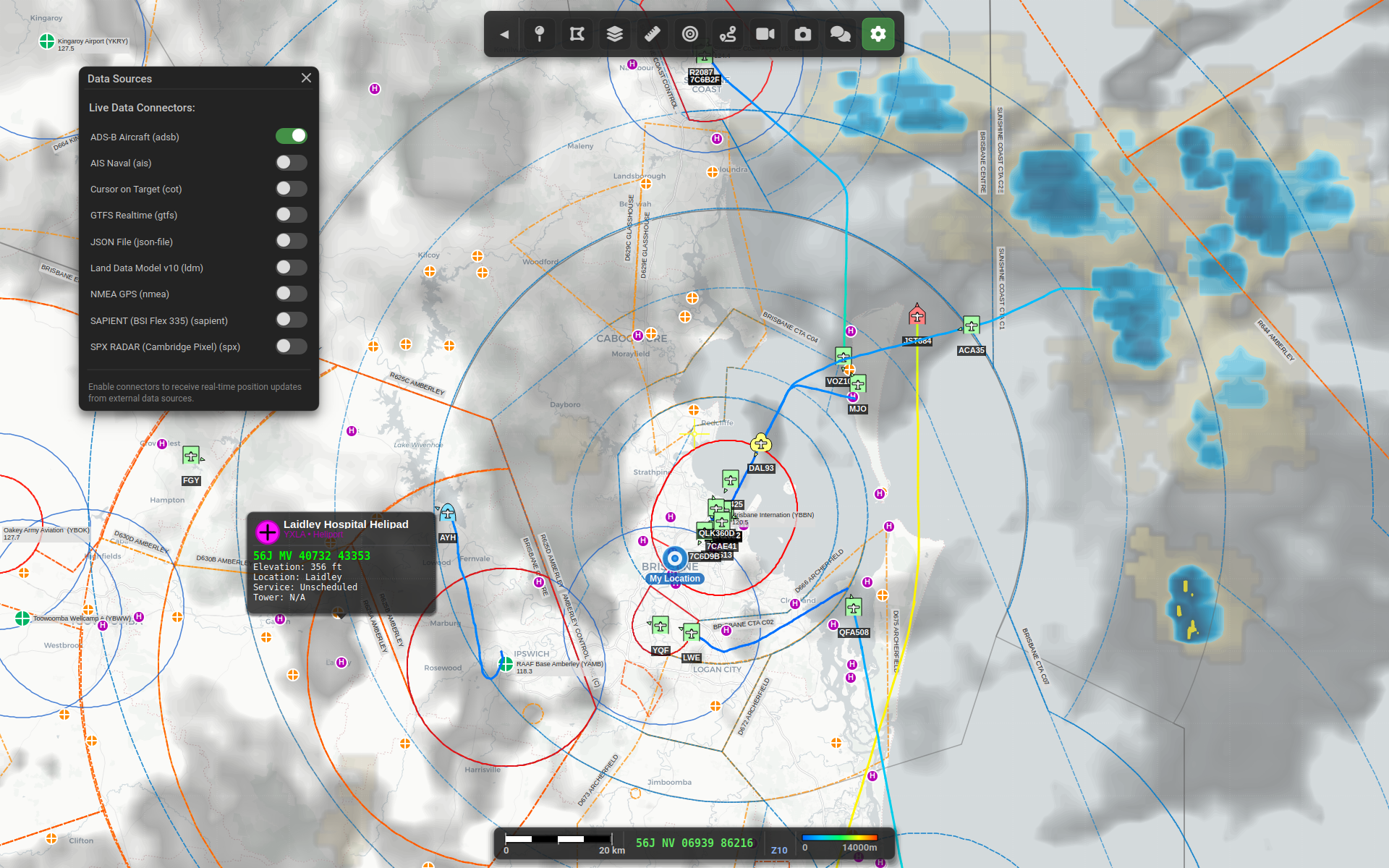
Bring your own transponder reciever or connect to online data sources.
Use Google GTFS protocol to view open source data for bus, trians, light rail, trams and ferries.
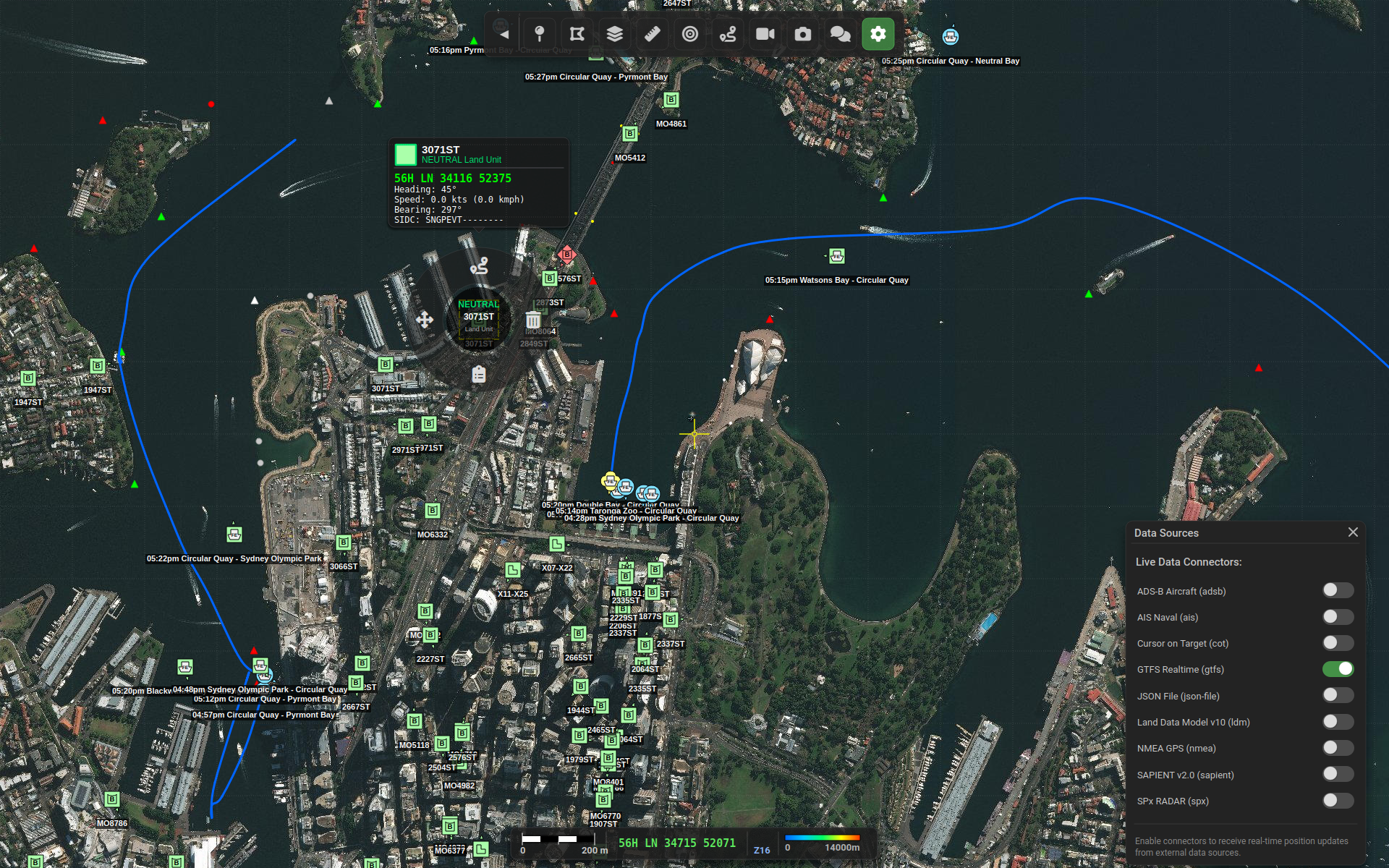
Connectors allow you to add new data sources.
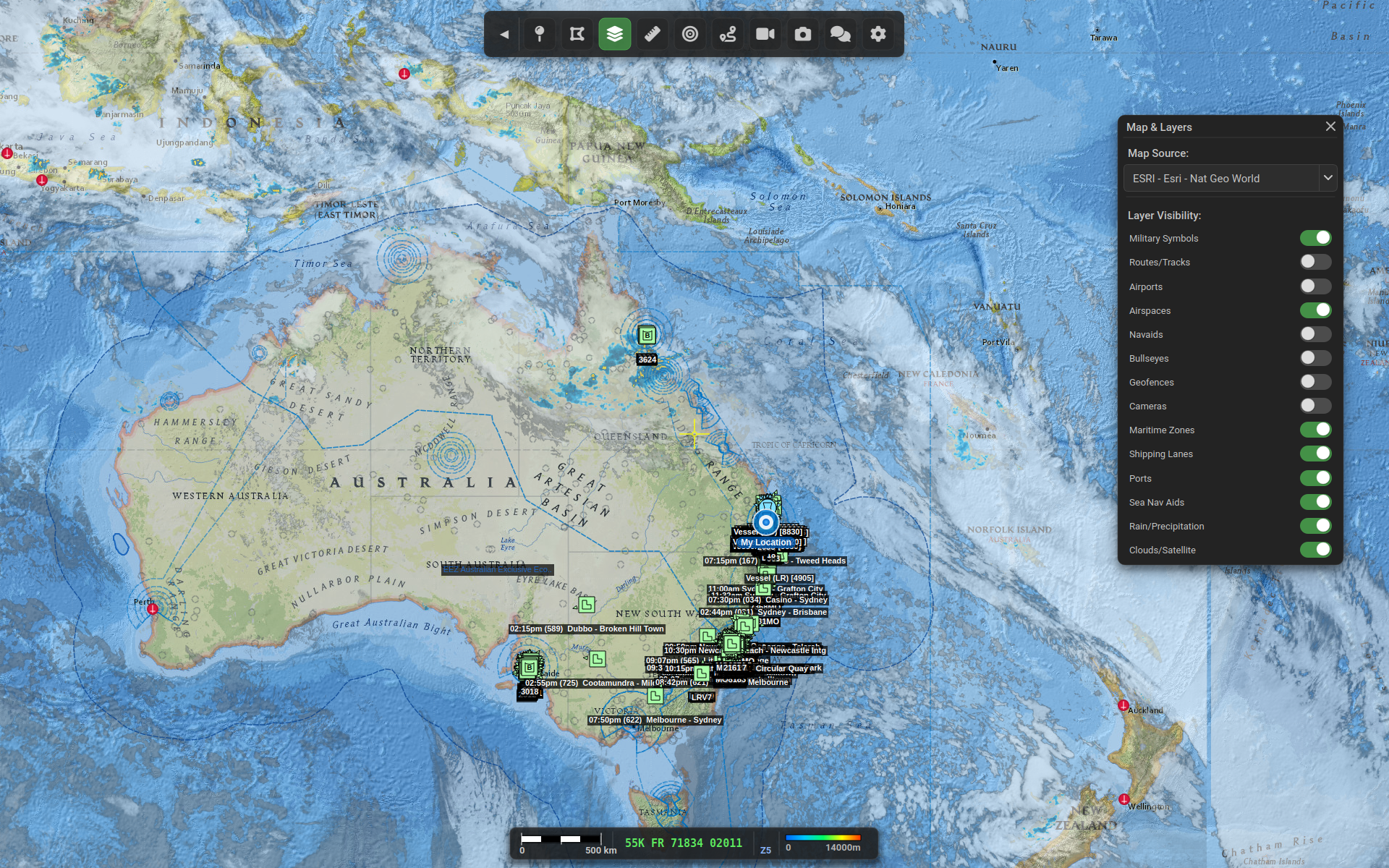
View realtime cloud (satalite images) and rain (RADAR) updates.
Datu agnostiskā arhitektūra
Mūsu BMS ir izstrādāta, balstoties uz datu agnostisku filozofiju , nodrošinot maksimālu elastību un nākotnes atbilstību jūsu darbības prasībām.
Pievienojiet jebkuru avotu, jebkuru formātu
- Vairākas datu plūsmas : nemanāmi ievāciet taktiskos datus no radioaparātiem, sensoriem, bezpilota lidaparātiem un saistītām sistēmām neatkarīgi no patentētiem formātiem.
- Protokola elastība : iebūvēts atbalsts militārajiem standarta protokoliem ar paplašināmiem adapteriem jauniem datu avotiem
- Reāllaika tulkošana : atšķirīgu datu formātu automātiska normalizācija vienotā darbības attēlā
- Nav pieķeršanās pie pārdevēja : jūsu dati joprojām ir pieejami un pārnēsājami, nekad netiek iesprostoti patentētās slēptuvēs
Vienota kopējā darbības aina
Pārveidojiet fragmentētu informāciju praktiski izmantojamā informācijā. Mūsu datu agnostiskā pieeja nozīmē, ka jūs redzat visu kaujas lauku, nevis tikai to, ko viena sistēma vēlas jums parādīt.
Atbalstītie savienotāji un datu avoti
| Savienotājs | Protokols | Transports | Apraksts |
|---|---|---|---|
| SPX radars | Kembridžas pikseļu binārais kods | UDP multiraide | RADAR trases ziņojumi no Cambridge Pixel sistēmām |
| SAPRATĪGS | BSI Flex 335 v2.0 | TCP Protobuf | Autonomu sensoru integrācija (AI, RADAR) |
| CoT | Kursors uz mērķa XML | TCP/Multiraides | TAK ekosistēmu integrācija (ATAK, WinTAK) |
| NMEA | NMEA 0183 | Seriālais/TCP | GPS pozīcijas dati |
| ADS-B | OpenSky REST | HTTP/JSON | Lidmašīnu pozīcijas reāllaikā |
| AIS | AIS ziņojumi | WebSocket | Jūras kuģu izsekošana |
| GTFS | GTFS reāllaikā | HTTP/Protobuf | Sabiedriskā transporta transportlīdzekļu pozīcijas |
| JSON fails | Pielāgots JSON | Failu sistēma | Statiskie pozīcijas dati ar tiešraides uzraudzību |
| LDM | Zemes datu modelis v10 | DDS | GVA transportlīdzekļa/vienības pozīcijas |
![]()
![]()
Mūsu BMS ir daļa no plašāka produktu klāsta, ko nodrošina Genaric Vehicle Architecture (GVA) — atvērts standarts, kas izstrādāts saskaņā ar Land Open Systems Architecture (LOSA) — Apvienotās Karalistes Aizsardzības ministrijas iniciatīvu, lai uzlabotu sadarbspēju starp piegādātājiem. Skatiet tālāk sniegto dokumentāciju.