ツールX
発見。ストリーミング。管理。GVAプラットフォーム向けのゼロ設定ビデオ配信。DEF STAN 00-082準拠のビデオストリーミング
課題
現代の装甲車両は、昼光、サーマル、乗客用など20台以上のカメラを搭載し、共有イーサネットバックボーンを介して同時にストリーミング配信を行っています。DEF STAN 00-082では、車両上のすべてのディスプレイが、手動設定を必要とせずに、あらゆるフィードを自動的に検出し、レンダリングできることが要求されています。
ToolX がそれを実現します。
仕組み
車載ネットワークにカメラを接続すると、ToolXがそれを通知し、すべてのディスプレイがそれを見つけ、ビデオが流れる。これで完了です。
3 つのプロトコルがシームレスに連携します。
| プロトコル | 何をするのか | |
|---|---|---|
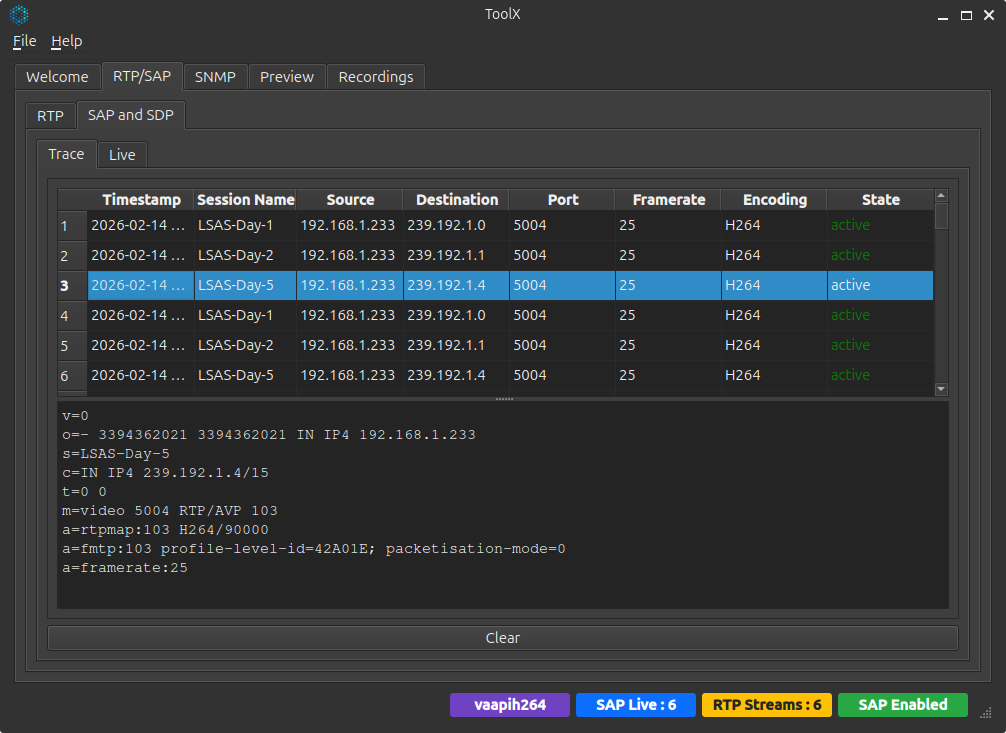
| 発見する | SAP | カメラは数秒ごとにネットワーク上で自己紹介する |
| 説明する | SDP | 各アナウンスには解像度、コーデック、アドレスの詳細が記載されています |
| 届ける | RTP | 効率的なUDPマルチキャストによるビデオペイロードストリーム |
主な特徴
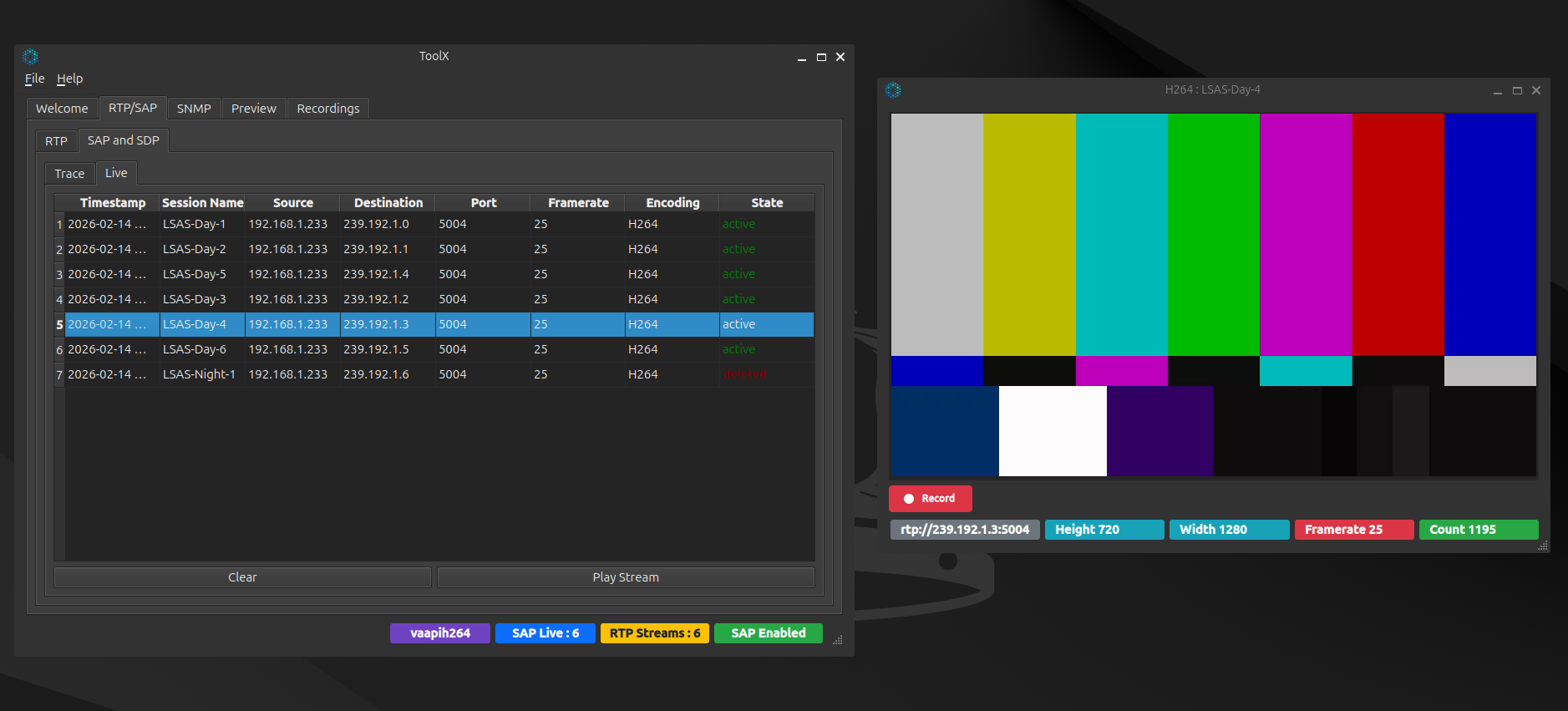
自動ストリーム検出
IPアドレスの設定やスプレッドシートのメンテナンスは不要です。カメラがネットワーク上でSAPのアナウンスを放送すると、ToolXが利用可能なすべてのフィードのライブインベントリを構築し、リアルタイムで更新します。
- カメラがオンラインになってから数秒以内にストリームが表示されます
- アナウンスが停止すると、古いフィードには自動的にフラグが付けられます
- カメラの電源を切ったときにSAPを削除してクリーンな削除
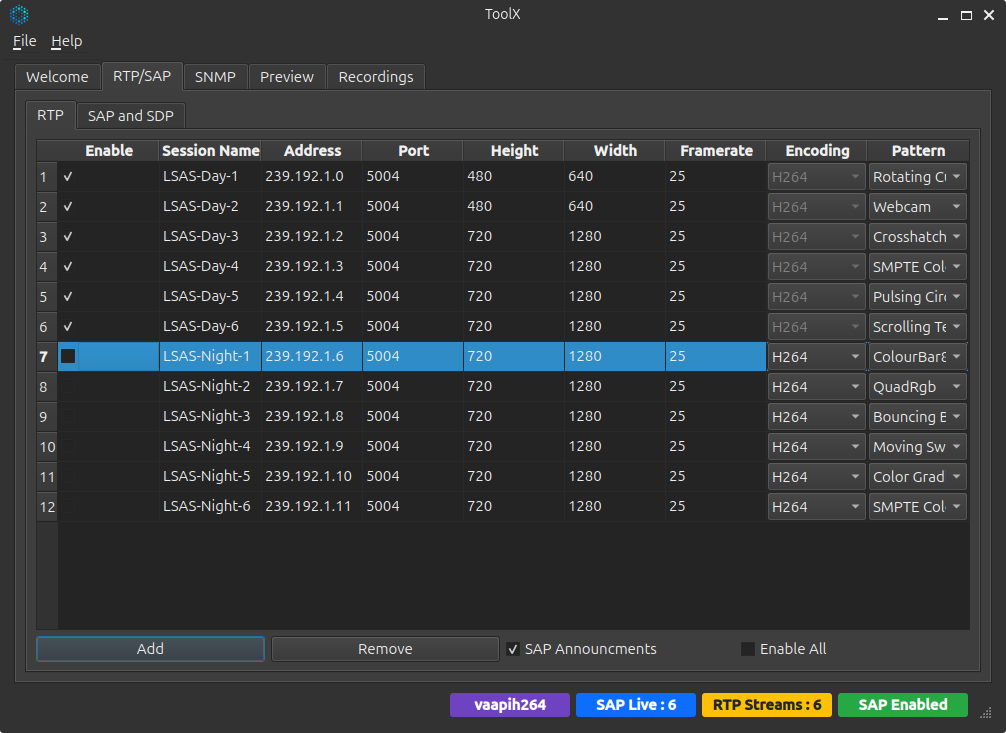
幅広いコーデックのサポート
ロスレスの非圧縮から帯域幅効率の高い圧縮まで、ミッションに適した形式を選択します。
| 形式 | 品質 | 帯域幅 | 最適な用途 |
|---|---|---|---|
| YCbCr 4 2 | ロスレス | 約368Mbps | 最高の忠実度、10 GbE ネットワーク |
| RGB 24ビット | ロスレス | 約553Mbps | 汎用、フルカラー深度 |
| モノラル8/16ビット | ロスレス | 約18 / 37 Mbps | 熱画像(TI)センサー |
| H.264 | ほぼロスレス | 約2~8Mbps | 標準1GbEネットワーク、マルチカメラ |
| H.265 | ほぼロスレス | 約1~4Mbps | 帯域幅制限のあるリンク |
ハードウェアアクセラレーションによるエンコード
複数のエンコーダバックエンドにより、レイテンシが低く抑えられ、CPU 使用率も最小限に抑えられます。
- VA-API — GPU ハードウェア アクセラレーション (デフォルト)
- OpenH264 — ポータブルソフトウェアコーデック
- OpenMAX — 組み込みプラットフォーム(Raspberry Pi、SBC)
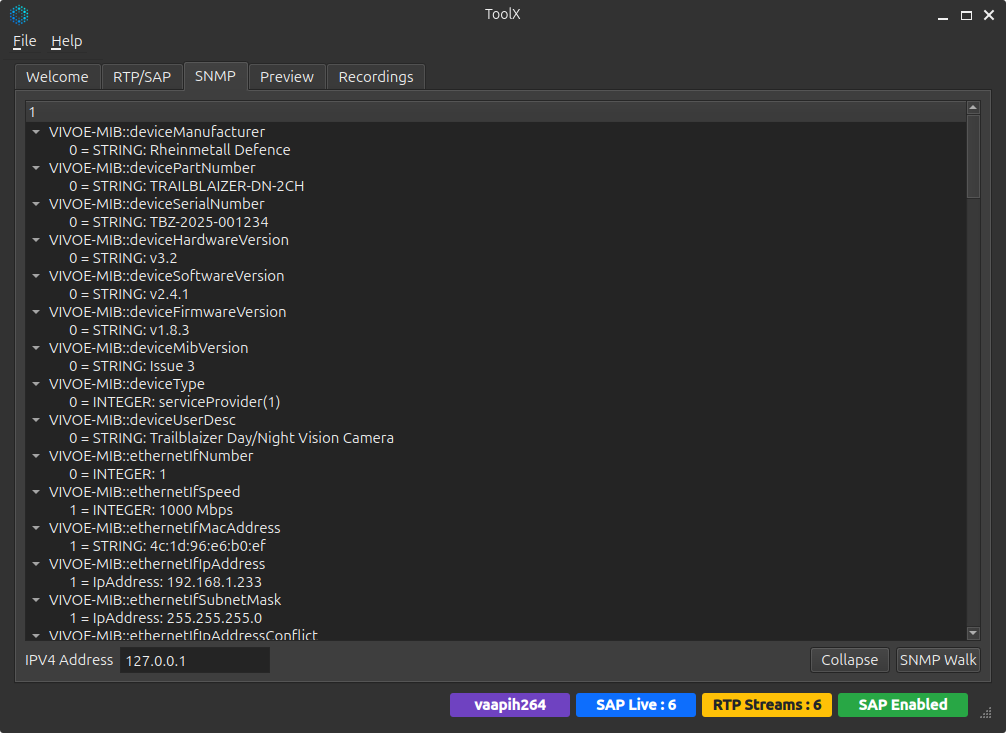
組み込みデバイス管理(VIVOE MIB)
GVA ネットワーク上のすべてのカメラは、DEF STAN 00-082 付録 A で定義されている標準の SNMP 管理インターフェイスを公開します。ToolX には、準拠しているデバイスを照会するための組み込みの SNMP ブラウザーが含まれています。
Manufacturer, serial, versions "] B["videoFormatTable
Resolution, codec, colourspace "] C["channelControl
Multicast IP, RTP config, SAP "] D["vivoeNotifications
Error & conflict traps "] end ROOT --> A ROOT --> B ROOT --> C ROOT --> D
DEF STAN 00-082の概要
ToolX のあらゆる機能は標準規格に直接準拠しています。コンプライアンスの概要は以下のとおりです。
| 要件 | スタンダードは言う | ToolXの成果 |
|---|---|---|
| 河川輸送 | RTP over UDP マルチキャスト | 239.192.xx:5004のすべてのストリーム |
| 非圧縮ビデオ | RFC 4175 必須 | RGB24、YCbCr42、モノ8、モノ16 |
| ストリームの発見 | SAP/SDPが必要 | 自動アナウンス + ライブディスカバリーテーブル |
| ストリームの削除 | SAPの削除が必要です | クリーンシャットダウンのお知らせ |
| デバイス管理 | VIVOE MIB を SNMPv2c 経由で | 内蔵SNMPウォーク&クエリ |
| カメラの命名 | GVA指定 | 標準 DL / TI / PAX 命名 |
| マルチストリーム | 20以上の同時フィード | 車両カメラ一式でテスト済み |
GVAカメラの指定
カメラは標準化された命名規則に従うため、オペレーターは常にどのビューを見ているのかがわかります。
| コード | 意味 | 例 |
|---|---|---|
| ダウンロード | 日光(可視スペクトル) | フロントセンターDL |
| TI | 熱画像(赤外線) | フロントセンターTI |
| パックス | 乗客/車内 | PAXカメラ1 |
位置 (前、後、左、右、中央) と組み合わせることで、車両上のすべてのカメラに、人間が判読できる固有の ID が付与されます。
ネットワークアーキテクチャ
Stream Discovery"] RTP["RTP
Video Delivery"] SNMP["SNMPv2c
VIVOE MIB"] end subgraph "Transport" SAP --> UDP1["UDP 224.2.127.254:9875"] RTP --> UDP2["UDP 239.192.x.x:5004"] SNMP --> UDP3["UDP unicast :161"] end subgraph "Network" UDP1 --> MC["IPv4 Multicast"] UDP2 --> MC UDP3 --> UC["IPv4 Unicast"] end MC --> ETH["1 GbE / 10 GbE Ethernet"] UC --> ETH
帯域幅計画
複数のカメラを運用していますか?1280×720 @ 25 fpsで期待できる結果は次の通りです。
| コーデック | ストリームごと | 11台のカメラ | 20台のカメラ |
|---|---|---|---|
| YCbCr 4 2 | 369 Mbps | 4.1 Gbps | 7.4 Gbps |
| H.264 | 2~8Mbps | 22~88 Mbps | 40~160 Mbps |
| H.265 | 1~4 Mbps | 11~44 Mbps | 20~80Mbps |
結論: H.264は、標準的な1GbEバックボーンに車載カメラ一式を無理なく収容できます。非圧縮では10GbEが必要ですが、遅延ゼロでピクセルパーフェクトな画像を提供します。
展開シナリオ
H.264 720p 25fps"] end subgraph "Trailblaizer Pod" C2["2 Cameras
Day + Night
1080p H.264"] end subgraph "Pi Camera Array" C3["6 × Raspberry Pi
720p H.264"] end C1 --> N["GVA Ethernet Backbone"] C2 --> N C3 --> N N --> D1["Crew Station 1"] N --> D2["Crew Station 2"] N --> D3["Commander Display"] N --> TX["ToolX
Diagnostics &
Monitoring"]
ToolXを選ぶ理由
- 標準第一— DEF STAN 00-082 Issue 3 のためにゼロから構築
- ゼロ構成- SAP/SDP自動検出により、手動でのストリーム設定は不要
- コーデックの柔軟性- 品質のために非圧縮、帯域幅のためにH.264/H.265を選択可能
- 完全な診断- ライブSAP監視、ストリーム再生、SNMPデバイス検査、記録
- オープンアーキテクチャ- MediaXオープンソースライブラリ上に構築
- クロスプラットフォーム- Linuxネイティブ、Qt6 GUI、組み込みデプロイメント用のヘッドレスCLIツール